Страница: 4/9
V=![]() grad b=
grad b= (1.5.1)
(1.5.1)
 (1.5.2)
(1.5.2)
Главное различие в теории измерений на неподвижном основании и на подвижной, то что при измерении на подвижном основании нужно перейти от топоцентрической системы координат к инерциальной системе. Фирма «Белл» (Bell Aerospace-Textron, Буффало, Нью-Йорк) разработала систему для градиентометрической съёмки GGSS, предназначенную для работы на автомашине или самолёте. Основными частями системы являются три ортогональных гравитационных градиентометра, установленные с наклоном в 35° на трехосной гироплатформе для непрерывной ориентации в топоцентрической системе координат, связанной с гравитационным полем. Каждый градиентометр содержит две пары акселерометров фирмы Белл (расстояние 0,1 м), установленных ортогонально по краю диска (диаметр 0,2 м); их измерительные оси ориентированы по касательной к диску (рис. 7). Ускорение пробной массы, укрепленной на маятниковом подвесе, измеряется двумя кольцевыми емкостными датчиками, расположенными по обе стороны от этой массы. Выходной сигнал датчиков усиливается и преобразуется в ток. Ток подается в катушку для возвращения пробной массы в нулевое положение.  рис. 7 Принцип вращающегося гравитационного градиентометра
рис. 7 Принцип вращающегося гравитационного градиентометра
Система фирмы Белл содержит также приёмоиндикатор спутниковой системы GPS, обеспечивающий в сочетании с акселерометрами и гироплатформой информацию о местоположении и ориентации, блок регистрации данных, компьютер и источник питания (рис. 9). Система с кондиционером предназначена для работы в автомобильном фургоне, который в свою очередь можно разместить в самолете (C-130) для измерений в воздухе.
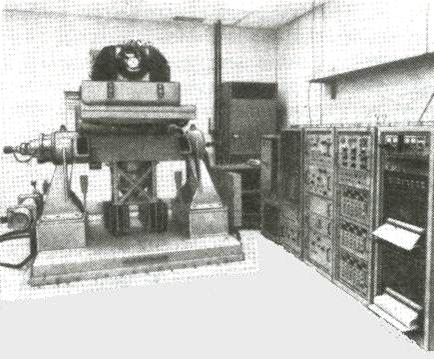
рис. 9 Платформа геодезического гравитационного градиентометра (GGSS), установленная на стол Скорсби для лабораторных калибровок (фотография предоставлена фирмой «Белл» и геофизической лабораторией ВВС США).
При скорости движения 40 км/ч (автомобиль) или 400 км/ч (самолёт) выходная информация выдаётся соответственно с шагом 100 м. или 1 км.
1.6 Спутниковая градиентоментрия
В настоящее время разрабатываются гравитационные градиентометры, которые основаны на традиционных или сверхпроводящих устройствах и будут установлены на спутниках, планируемых на 1990-е гг. Спутники будут запущены на практически круговые полярные орбиты с высотами от 160 до 250 км. Полагают, что за 6 мес. работы средние значения аномалий силы тяжести (по трапециям 1° х 1° и 0,5° х 0,5°) при разрешении 100— 50 км будут получены с ошибкой ±20 — 50 мкм • с -2. Приведем примеры разработок, основанных на разных принципах
Французская программа GRADlO (Национальное бюро по аэродинамическим исследованиям и Исследовательская группа по космической геодезии) предусматривает создание градиентометра на базе традиционной технологии. В этом приборе имеется несколько микроакселерометров, которые расположены симметрично относительно центра масс по углам многоугольника так, что можно определить полный гравитационный тензор. Трехосные электростатические акселерометры должны иметь разрешение 10 - 12 м • с - 2. При максимальных возмущающих ускорениях около 10 - 4 м • с - 2 (на высоте 200км) прибор должен иметь динамический измерительный диапазон 10 8; для непрерывного контроля и калибровки акселерометров предусмотрена бортовая калибровочная система.
Примером сверхпроводящего градиентометра является прибор Пайка, созданный в Университете штата Мэриленд, США. Основными элементами этой невращающейся системы служат сверхпроводящие акселерометры. Акселерометр содержит пробную массу на мягком подвесе, магнитный преобразователь и усилитель с низкими шумами (сверхпроводящее квантовое интерференционное устройство сквид — SQUID) в состоянии сверхпроводимости. Магнитное поле, создаваемое катушками преобразователя, модулируется при движении пробной массы, в сквиде происходит детектирование и усиление модулирующего сигнала, который затем преобразуется в выходное электрическое напряжение.
Реферат опубликован: 13/08/2008